Quickstart
A quick introduction on how to use the OQuPy package to compute the dynamics of a quantum system that is possibly strongly coupled to a structured environment. We illustrate this by applying the TEMPO method to the strongly coupled spin boson model.
Contents:
Example - The spin boson model
The model and its parameters
Create system, correlations and bath objects
TEMPO computation
First, let’s import OQuPy and some other packages we are going to use
import sys
sys.path.insert(0,'..')
import oqupy
import numpy as np
import matplotlib.pyplot as plt
and check what version of tempo we are using.
oqupy.__version__
'0.2-dev'
Let’s also import some shorthands for the spin Pauli operators and density matrices.
sigma_x = oqupy.operators.sigma("x")
sigma_y = oqupy.operators.sigma("y")
sigma_z = oqupy.operators.sigma("z")
up_density_matrix = oqupy.operators.spin_dm("z+")
down_density_matrix = oqupy.operators.spin_dm("z-")
mixed_density_matrix = oqupy.operators.spin_dm("mixed")
Example - The spin boson model
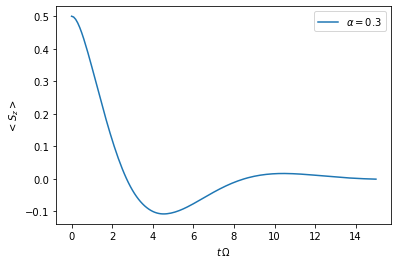
As a first example let’s try to reconstruct one of the lines in figure 2a of [Strathearn2018] (Nat. Comm. 9, 3322 (2018) / arXiv:1711.09641v3). In this example we compute the time evolution of a spin which is strongly coupled to an ohmic bath (spin-boson model). Before we go through this step by step below, let’s have a brief look at the script that will do the job - just to have an idea where we are going:
Omega = 1.0
omega_cutoff = 5.0
alpha = 0.3
system = oqupy.System(0.5 * Omega * sigma_x)
correlations = oqupy.PowerLawSD(alpha=alpha,
zeta=1,
cutoff=omega_cutoff,
cutoff_type='exponential')
bath = oqupy.Bath(0.5 * sigma_z, correlations)
tempo_parameters = oqupy.TempoParameters(dt=0.1, dkmax=30, epsrel=10**(-4))
dynamics = oqupy.tempo_compute(system=system,
bath=bath,
initial_state=up_density_matrix,
start_time=0.0,
end_time=15.0,
parameters=tempo_parameters)
t, s_z = dynamics.expectations(0.5*sigma_z, real=True)
plt.plot(t, s_z, label=r'$\alpha=0.3$')
plt.xlabel(r'$t\,\Omega$')
plt.ylabel(r'$<S_z>$')
plt.legend()
100.0% 150 of 150 [########################################] 00:00:11
Elapsed time: 11.6s
<matplotlib.legend.Legend at 0x7f26bda967b8>
1. The model and its parameters
We consider a system Hamiltonian
a bath Hamiltonian
and an interaction Hamiltonian
where \(\hat{\sigma}_i\) are the Pauli operators, and the \(g_k\) and \(\omega_k\) are such that the spectral density \(J(\omega)\) is
Also, let’s assume the initial density matrix of the spin is the up state
and the bath is initially at zero temperature.
For the numerical simulation it is advisable to choose a characteristic frequency and express all other physical parameters in terms of this frequency. Here, we choose \(\Omega\) for this and write:
\(\Omega = 1.0 \Omega\)
\(\omega_c = 5.0 \Omega\)
\(\alpha = 0.3\)
Omega = 1.0
omega_cutoff = 5.0
alpha = 0.3
2. Create system, correlations and bath objects
System
system = oqupy.System(0.5 * Omega * sigma_x)
Correlations
Because the spectral density is of the standard power-law form,
with \(\zeta=1\) and \(X\) of the type 'exponential' we
define the spectral density with:
correlations = oqupy.PowerLawSD(alpha=alpha,
zeta=1,
cutoff=omega_cutoff,
cutoff_type='exponential')
Bath
The bath couples with the operator \(\frac{1}{2}\hat{\sigma}_z\) to the system.
bath = oqupy.Bath(0.5 * sigma_z, correlations)
3. TEMPO computation
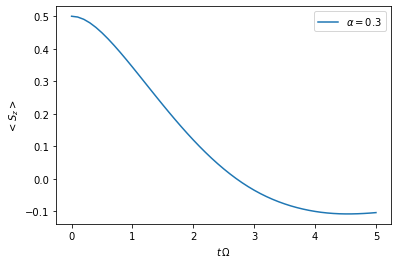
Now, that we have the system and the bath objects ready we can compute the dynamics of the spin starting in the up state, from time \(t=0\) to \(t=5\,\Omega^{-1}\)
dynamics_1 = oqupy.tempo_compute(system=system,
bath=bath,
initial_state=up_density_matrix,
start_time=0.0,
end_time=5.0,
tolerance=0.01)
../oqupy/tempo/tempo.py:548: UserWarning: Estimating parameters for TEMPO computation. No guarantee that resulting TEMPO computation converges towards the correct dynamics! Please refer to the TEMPO documentation and check convergence by varying the parameters for TEMPO manually.
warnings.warn(GUESS_WARNING_MSG, UserWarning)
WARNING: Estimating parameters for TEMPO computation. No guarantee that resulting TEMPO computation converges towards the correct dynamics! Please refer to the TEMPO documentation and check convergence by varying the parameters for TEMPO manually.
100.0% 80 of 80 [########################################] 00:00:06
Elapsed time: 6.3s
and plot the result:
t_1, z_1 = dynamics_1.expectations(0.5*sigma_z, real=True)
plt.plot(t_1, z_1, label=r'$\alpha=0.3$')
plt.xlabel(r'$t\,\Omega$')
plt.ylabel(r'$<S_z>$')
plt.legend()
<matplotlib.legend.Legend at 0x7f26bd737e10>
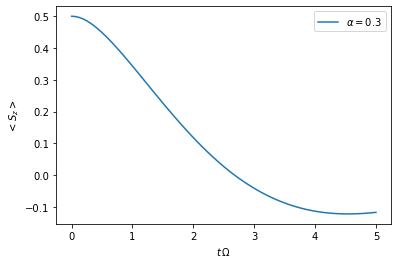
Yay! This looks like the plot in figure 2a [Strathearn2018].
Let’s have a look at the above warning. It said:
WARNING: Estimating parameters for TEMPO calculation. No guarantie that resulting TEMPO calculation converges towards the correct dynamics! Please refere to the TEMPO documentation and check convergence by varying the parameters for TEMPO manually.
We got this message because we didn’t tell the package what parameters
to use for the TEMPO computation, but instead only specified a
tolerance. The package tries it’s best by implicitly calling the
function oqupy.guess_tempo_parameters() to find parameters that are
appropriate for the spectral density and system objects given.
TEMPO Parameters
There are three key parameters to a TEMPO computation:
dt- Length of a time step \(\delta t\) - It should be small enough such that a trotterisation between the system Hamiltonian and the environment it valid, and the environment auto-correlation function is reasonably well sampled.dkmax- Number of time steps \(K \in \mathbb{N}\) - It must be large enough such that \(\delta t \times K\) is larger than the neccessary memory time \(\tau_\mathrm{cut}\).epsrel- The maximal relative error \(\epsilon_\mathrm{rel}\) in the singular value truncation - It must be small enough such that the numerical compression (using tensor network algorithms) does not truncate relevant correlations.
To choose the right set of initial parameters, we recommend to first use
the oqupy.guess_tempo_parameters() function and then check with the
helper function oqupy.helpers.plot_correlations_with_parameters()
whether it satisfies the above requirements:
parameters = oqupy.guess_tempo_parameters(system=system,
bath=bath,
start_time=0.0,
end_time=5.0,
tolerance=0.01)
print(parameters)
../oqupy/tempo/tempo.py:548: UserWarning: Estimating parameters for TEMPO computation. No guarantee that resulting TEMPO computation converges towards the correct dynamics! Please refer to the TEMPO documentation and check convergence by varying the parameters for TEMPO manually.
warnings.warn(GUESS_WARNING_MSG, UserWarning)
WARNING: Estimating parameters for TEMPO computation. No guarantee that resulting TEMPO computation converges towards the correct dynamics! Please refer to the TEMPO documentation and check convergence by varying the parameters for TEMPO manually.
----------------------------------------------
TempoParameters object: Roughly estimated parameters
Estimated with 'guess_tempo_parameters()'
dt = 0.0625
dkmax = 37
epsrel = 2.4846963223857106e-05
add_correlation_time = None
fig, ax = plt.subplots(1,1)
oqupy.helpers.plot_correlations_with_parameters(bath.correlations, parameters, ax=ax)
<AxesSubplot:>
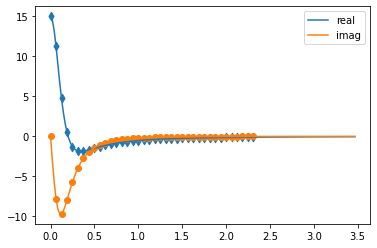
In this plot you see the real and imaginary part of the environments
auto-correlation as a function of the delay time \(\tau\) and the
sampling of it corresponding the the chosen parameters. The spacing and
the number of sampling points is given by dt and dkmax
respectively. We can see that the auto-correlation function is close to
zero for delay times larger than approx \(2 \Omega^{-1}\) and that
the sampling points follow the curve reasonably well. Thus this is a
reasonable set of parameters.
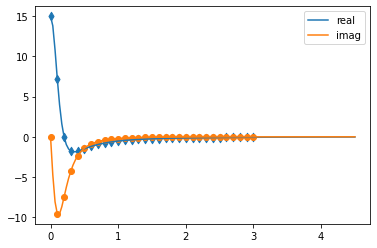
We can choose a set of parameters by hand and bundle them into a
TempoParameters object,
tempo_parameters = oqupy.TempoParameters(dt=0.1, dkmax=30, epsrel=10**(-4), name="my rough parameters")
print(tempo_parameters)
----------------------------------------------
TempoParameters object: my rough parameters
__no_description__
dt = 0.1
dkmax = 30
epsrel = 0.0001
add_correlation_time = None
and check again with the helper function:
fig, ax = plt.subplots(1,1)
oqupy.helpers.plot_correlations_with_parameters(bath.correlations, tempo_parameters, ax=ax)
<AxesSubplot:>
We could feed this object into the oqupy.tempo_compute() function to
get the dynamics of the system. However, instead of that, we can split
up the work that oqupy.tempo_compute() does into several steps,
which allows us to resume a computation to get later system dynamics
without having to start over. For this we start with creating a
Tempo object:
tempo = oqupy.Tempo(system=system,
bath=bath,
parameters=tempo_parameters,
initial_state=up_density_matrix,
start_time=0.0)
We can start by computing the dynamics up to time \(5.0\,\Omega^{-1}\),
tempo.compute(end_time=5.0)
100.0% 50 of 50 [########################################] 00:00:02
Elapsed time: 2.9s
<oqupy.dynamics.Dynamics at 0x7f26bd5c9ef0>
then get and plot the dynamics of expecatation values,
dynamics_2 = tempo.get_dynamics()
plt.plot(*dynamics_2.expectations(0.5*sigma_z, real=True), label=r'$\alpha=0.3$')
plt.xlabel(r'$t\,\Omega$')
plt.ylabel(r'$<S_z>$')
plt.legend()
<matplotlib.legend.Legend at 0x7f26bd9580b8>
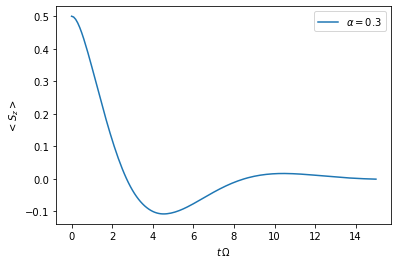
then continue the computation to \(15.0\,\Omega^{-1}\),
tempo.compute(end_time=15.0)
100.0% 100 of 100 [########################################] 00:00:12
Elapsed time: 12.0s
<oqupy.dynamics.Dynamics at 0x7f26bd5c9ef0>
and then again get and plot the dynamics of expecatation values.
dynamics_2 = tempo.get_dynamics()
plt.plot(*dynamics_2.expectations(0.5*sigma_z, real=True), label=r'$\alpha=0.3$')
plt.xlabel(r'$t\,\Omega$')
plt.ylabel(r'$<S_z>$')
plt.legend()
<matplotlib.legend.Legend at 0x7f26bd8caba8>
Finally, we note: to validate the accuracy the result it vital to
check the convergence of such a simulation by varying all three
computational parameters! For this we recommend repeating the same
simulation with slightly “better” parameters (smaller dt, larger
dkmax, smaller epsrel) and to consider the difference of the
result as an estimate of the upper bound of the accuracy of the
simulation.